Learning the network structure from the dynamics
gradnetconcepts demonstrated below
ODE integration via
gradnet.integrate_odeDefining a loss function for reconstructing the underlying network based on the dynamical system
Optimizer selection
Learning rate scheduler
Logging with TensorBoard
Integrating an ODE with events
Problem setup
Simulate Kuramoto model on a network, measure the phases and use these phases to reconstruct the network structure.
Install
install the required dependencies silently
%%capture
!pip install 'gradnet[examples]'
Generate ground-truth ER graph and simulate Kuramoto data
import math
import torch
from gradnet import GradNet, integrate_ode, fit
from gradnet.utils import plot_adjacency_heatmap, random_seed
import matplotlib.pyplot as plt
import networkx as nx
import numpy as np
from matplotlib.lines import Line2D
# random_seed(42)
N = 50
degree = 3
net_true = nx.random_regular_graph(degree, N)
A_true = torch.tensor(nx.to_numpy_array(net_true))
omega = torch.rand(N)-0.5
theta0 = 2 * math.pi * torch.rand(N)
T_final = 100 # arbitrary large final time. Integration will stop much earlier once system synchronizes
tt = torch.linspace(0.0, T_final, T_final*10)
def kuramoto_rhs(t, theta, A, omega):
sinx = torch.sin(theta)
cosx = torch.cos(theta)
return omega + cosx * (A @ sinx) - sinx * (A @ cosx)
"Event function to stop integration when the system has fully phase-locked."
def stationary_state_event(t, y, A, omega):
dtheta_dt = kuramoto_rhs(t, y, A, omega)
return torch.norm(dtheta_dt-dtheta_dt.mean()) - 0.05 # dtheta_dt.mean() removes the common drift
# simulate kuramoto model
tt, theta_obs, t_synched, theta_synched = integrate_ode(A_true,
f=kuramoto_rhs,
x0=theta0,
tt=tt,
f_kwargs={"omega": omega},
track_gradients=False,
event_fn=stationary_state_event)
time_steps = len(tt)
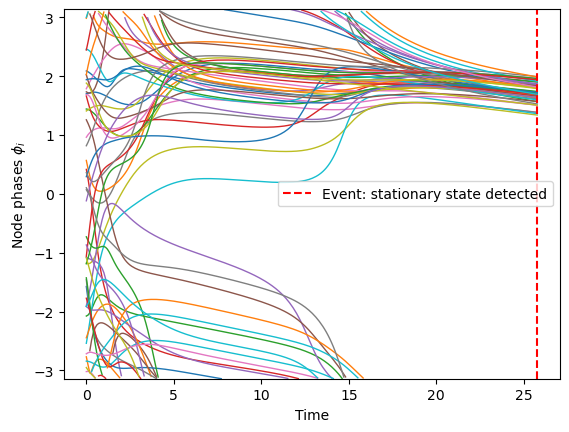
# Plot measured phases
wrap_pi = lambda x: (x + np.pi) % (2*np.pi) - np.pi
for y in map(wrap_pi, theta_obs.T):
y[np.abs(np.diff(y, prepend=y[0])) > np.pi] = np.nan # remove artefact jumps
plt.plot(tt, y, lw=1)
plt.ylim(-np.pi, np.pi);
plt.xlabel('Time');
plt.ylabel(r'Node phases $\phi_i$')
plt.axvline(t_synched.item(), color='red', linestyle='--', label='Event: stationary state detected')
plt.legend()
plt.show()
Fit GradNet to the observed trajectories
budget = float(A_true.sum().item())
gn_recon = GradNet(num_nodes=N, budget=budget, rand_init_weights=False, strict_budget=True)
def reconstruction_loss(gn):
'''Here we predict each time step from the previous one, assuming the current gn is
the substrate network. We compare each predicted step to the actual observed step.
The loss is the mean squared error in the (sin, cos) representation of the phases.
If the loss=0, we have predicted each step perfectly.
'''
loss_sum = 0
norm_factor = (time_steps - 1) * N
for t_idx in range(1, time_steps):
theta_init = theta_obs[t_idx - 1]
tt_step = tt[t_idx - 1 : t_idx + 1]
_, theta_step_pred = integrate_ode(gn, f=kuramoto_rhs,
x0=theta_init, tt=tt_step, f_kwargs={"omega": omega}, )
pred_sin = torch.sin(theta_step_pred[-1])
pred_cos = torch.cos(theta_step_pred[-1])
target_sin = torch.sin(theta_obs[t_idx])
target_cos = torch.cos(theta_obs[t_idx])
sq_error = (pred_sin - target_sin) ** 2 + (pred_cos - target_cos) ** 2
loss_sum += sq_error.sum()
mean_loss = loss_sum / norm_factor
missclass_num = ((gn() > 0.5) != (A_true > 0)).float().sum().item() / 2
return mean_loss, {"missclass": missclass_num}
num_updates = 300
base_lr = 0.5
def lr_scheduler(epoch: int) -> float:
'''This is the multiplicative factor for the base learning rate. Can be changing and depends on epochs.'''
if epoch < num_updates * 0.2:
return 1 # first 20% of epochs at base_lr
if epoch < num_updates * 0.8:
return 0.2 # next 60% of epochs at 0.2*base_lr
return 0.02 # last 20% of epochs at 0.02*base_lr
fit(
gn=gn_recon,
loss_fn=reconstruction_loss,
num_updates=num_updates,
optim_cls=torch.optim.Adam,
optim_kwargs={"lr": base_lr},
sched_cls=torch.optim.lr_scheduler.LambdaLR,
sched_kwargs={"lr_lambda": lr_scheduler},
accelerator="cpu",
logger=True,
);
GPU available: True (mps), used: False
TPU available: False, using: 0 TPU cores
HPU available: False, using: 0 HPUs
| Name | Type | Params | Mode
-----------------------------------------
0 | gn | GradNet | 2.5 K | train
-----------------------------------------
2.5 K Trainable params
0 Non-trainable params
2.5 K Total params
0.010 Total estimated model params size (MB)
`Trainer.fit` stopped: `max_epochs=300` reached.
To track live plots of loss and other scalars (like the number of missclassified edges in this case), you first need to ensure that tensorboard is installed: type pip install tensorboard in terminal.
Then you should navigate your a terminal to your python project directory and type: tensorboard --logdir .
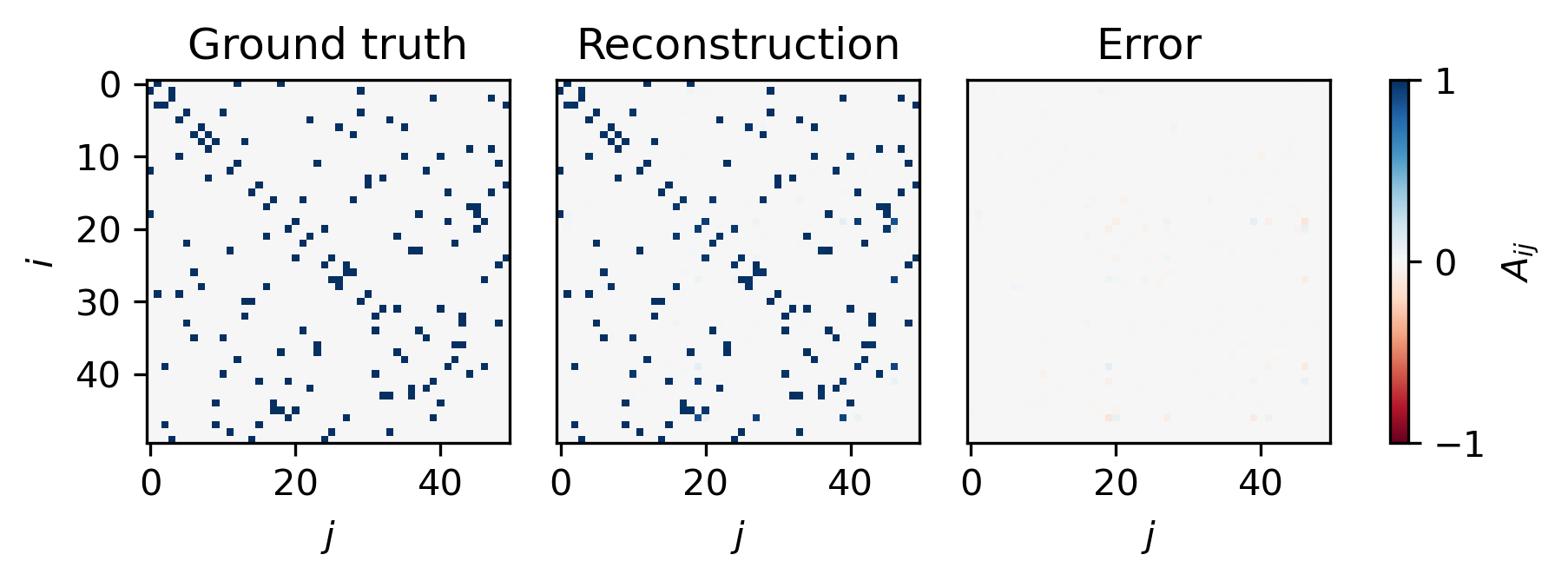
Visualization of Adjacency matrices
A_pred = gn_recon().detach()
from matplotlib.colors import TwoSlopeNorm
norm = TwoSlopeNorm(vmin=-1.0, vcenter=0.0, vmax=1.0)
imshow_kwargs = {"cmap": "RdBu", "norm": norm}
fig, axs = plt.subplots(1, 3, figsize=(6, 2), dpi=300, constrained_layout=True)
plot_adjacency_heatmap(A_true, ax=axs[0], title="Ground truth", imshow_kwargs=imshow_kwargs, add_colorbar=False)
plot_adjacency_heatmap(A_pred, ax=axs[1], title="Reconstruction", imshow_kwargs=imshow_kwargs, add_colorbar=False)
im = plot_adjacency_heatmap(A_pred - A_true, ax=axs[2], title="Error", imshow_kwargs=imshow_kwargs, add_colorbar=False)
cbar = fig.colorbar(im, ax=axs, location="right")
cbar.set_ticks([-1.0, 0.0, 1.0])
cbar.set_label("$A_{ij}$")
for ax in axs[1:]:
ax.set_ylabel(None)
ax.set_yticks([])
plt.show()
Evaluate reconstruction against the ground truth
def edge_confusion(A_true, A_pred, thr=0.5):
'''compute true positives, false positives, false negatives'''
i, j = torch.triu_indices(A_true.size(0), A_true.size(0), 1)
T, P = A_true[i,j] > 0, A_pred[i,j] > thr
tp, fp, fn = (P&T), (P&~T), (~P&T)
get = lambda m: list(zip(i[m].tolist(), j[m].tolist()))
return get(tp), get(fp), get(fn)
tp_edges, fp_edges, fn_edges = edge_confusion(A_true, A_pred, thr=0.5)
tp, fp, fn = len(tp_edges), len(fp_edges), len(fn_edges)
precision = tp / (tp + fp + 1e-8)
recall = tp / (tp + fn + 1e-8)
f1 = 2.0 * precision * recall / (precision + recall + 1e-8)
print(f"precision: {precision:.3f}")
print(f"recall: {recall:.3f}")
print(f"F1: {f1:.3f}")
precision: 1.000
recall: 1.000
F1: 1.000
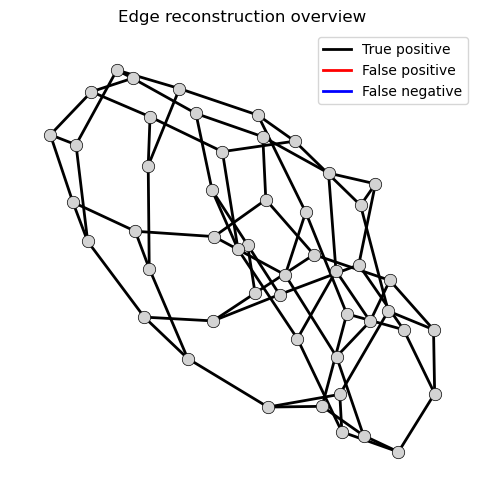
Network-level visualization of reconstruction quality
graph = nx.Graph()
graph.add_nodes_from(range(N))
graph.add_edges_from(tp_edges + fp_edges + fn_edges)
pos = nx.spring_layout(graph, seed=0)
fig_graph, ax_graph = plt.subplots(figsize=(6, 6))
nx.draw_networkx_nodes(graph, pos, ax=ax_graph, node_size=80,
node_color="lightgray", edgecolors="black",
linewidths=0.5)
nx.draw_networkx_edges(graph, pos, ax=ax_graph, edgelist=tp_edges, width=2, edge_color="black")
nx.draw_networkx_edges(graph, pos, ax=ax_graph, edgelist=fp_edges, width=2, edge_color="red")
nx.draw_networkx_edges(graph, pos, ax=ax_graph, edgelist=fn_edges, width=2, edge_color="blue")
ax_graph.set_title("Edge reconstruction overview")
ax_graph.set_axis_off()
legend_handles = [
Line2D([0], [0], color="black", lw=2, linestyle="-", label="True positive"),
Line2D([0], [0], color="red", lw=2, linestyle="-", label="False positive"),
Line2D([0], [0], color="blue", lw=2, linestyle="-", label="False negative"),
]
ax_graph.legend(handles=legend_handles, loc="upper right")
<matplotlib.legend.Legend at 0x32e9dde90>